Gait Generation Through a Feature Based Linear Periodic Function
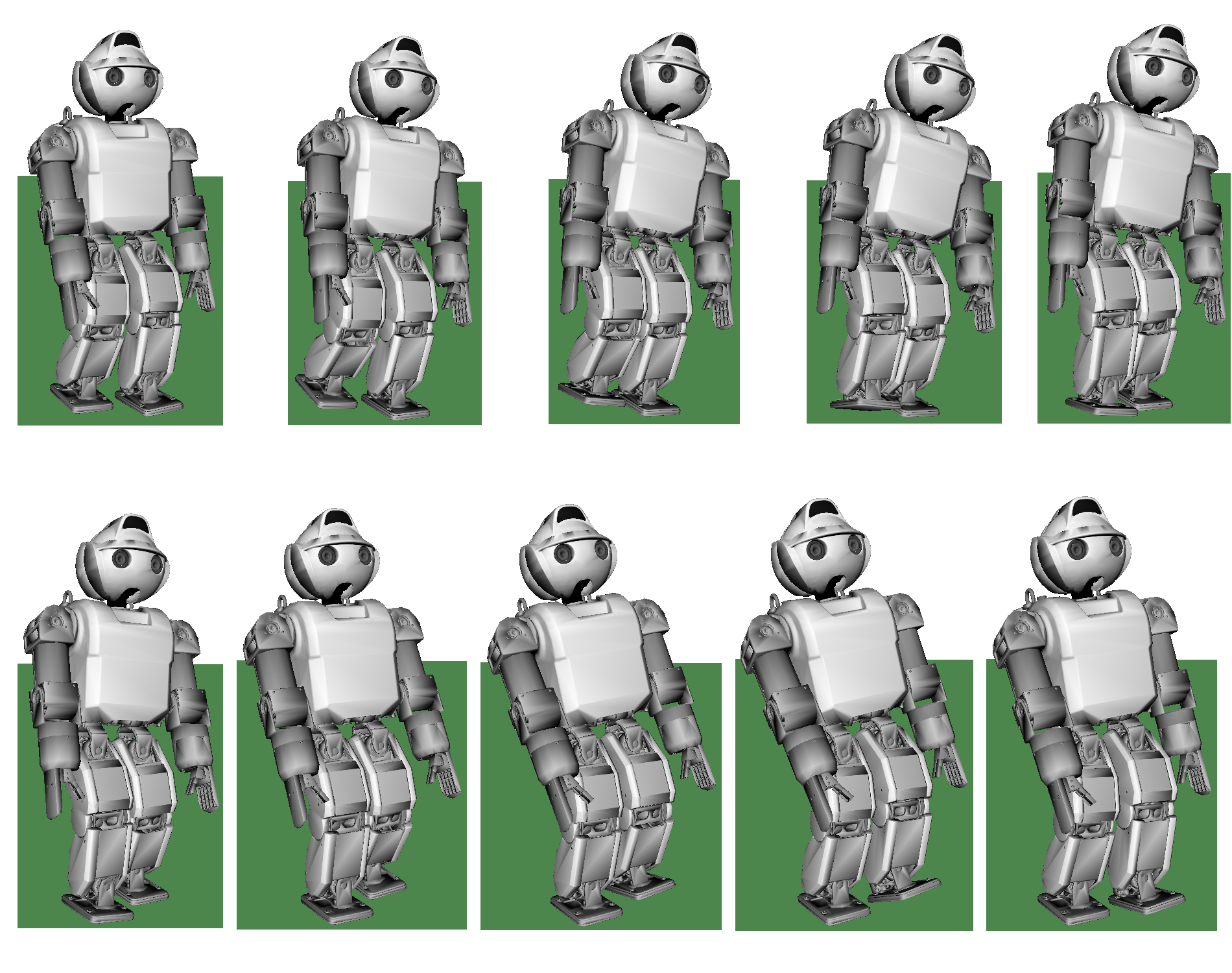
Considering locomotion as coordinated oscillations, this work proposes a method for generating diverse periodic linear gait trajectories. The trajectory shape is defined by features like symmetry, skewness, signal width, duality, and squareness, along with standard amplitude, offset, phase, and frequency parameters. Linear approximations were modeled based on proven nonlinear bipedal gait trajectories and tested on a simulated humanoid robot. Subsequently, Genetic Algorithms were used in a bottom-up approach to learn gait trajectories that produce stable and faster walking on the same humanoid robot.
Highlights Video
Publication
A. Ranganath and L. Moren, “Gait generation through a feature based linear periodic function”, in Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, Jun 2015. [PDF]