Gait Generation Through a Feature Based Linear Periodic Function
A feature-driven linear periodic gait generator (built from triangle/square-wave components) that can model a wide range of joint trajectories via interpretable shape features—and can be hand-fit to stable reference gaits or optimized end-to-end with a Genetic Algorithm to learn stable, faster bipedal walking.
Highlights Video
Overview
By considering locomotion as a set of coordinated oscillations, a method for generating a wide variety of periodic linear gait trajectories is proposed. The shape of the generated trajectory can be defined as a set of features such as symmetry, skewness, signal width, duality and squareness, along with amplitude, offset, phase and frequency parameters. Taking previously proven nonlinear bipedal gait trajectories as reference, a set of linear approximates are modeled, and is tested on a simulated humanoid robot. Then, gait trajectories for producing stable and faster bipedal gait on the same humanoid robot are learned using Genetic Algorithm, through a bottom-up approach.
Approach
- Proposes a feature-based linear periodic function for gait trajectories, parameterized by symmetry, duality, duty-cycle/width, skewness, and squareness (plus amplitude/offset/phase/period).
- Shows how the model can approximate nonlinear reference joint trajectories (e.g., cart-table/ZMP-derived gaits) using simple linear primitives.
- Introduces a practical stabilization “crescendo” filter to ramp trajectories from rest and avoid immediate balance loss at gait start.
- Demonstrates bottom-up learning of gait parameters with Genetic Algorithm, using symmetry/kinematic constraints to reduce search dimensionality substantially.
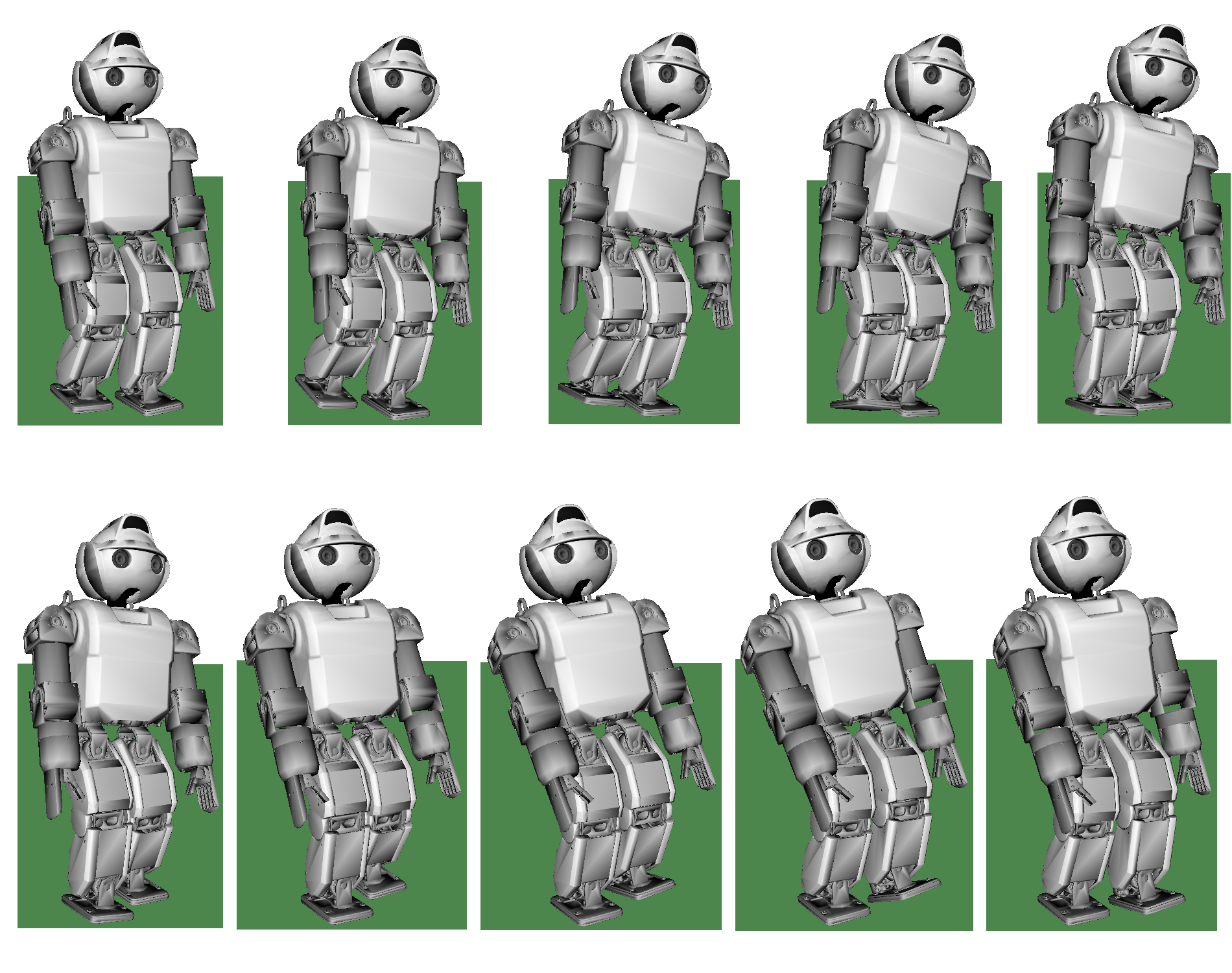
- Empirically validates on simulated HOAP-3: A hand-tuned controller achieves stable walking, and GA optimization yields a more stable and faster gait than the modeled baseline.
Publication
A. Ranganath and L. Moren, "Gait generation through a feature based linear periodic function", in Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, Jun 2015.
Download PDF