Hi, I'm Avinash Ranganath
Freelance RL/ML Engineer turning complex control and optimization problems into learned solutions.

AI-powered invoice verification and quality assurance to prevent payment errors and fraud.
As a solo founder, I'm building InvoiceQA from the ground up—leveraging my expertise in machine learning, LLM workflows, and full-stack development to create an intelligent system that automates the tedious process of invoice verification, helping businesses catch errors and potential fraud before payments go out.
InvoiceQA
Automated Invoice Verification
"Built by an ML engineer who understands both the AI and the business problem."
Freelance Work
Current and recent client engagements
Brick
RL/ML Lead
Leading the RL/ML efforts towards automating HVAC control systems. Developing intelligent control algorithms that optimize energy efficiency while maintaining comfort levels.
Services I Offer
- Reinforcement Learning Solutions
Custom RL agents and environments for various applications
- Machine Learning Engineering
End-to-end ML pipelines, model development, and deployment
- LLM Workflows & Agentic Systems
Custom LLM pipelines, autonomous agents, and intelligent automation
- Research & Prototyping
Exploring novel approaches and building proof-of-concepts
Past Projects
Friday Systems
RL-Based 3D Bin Packing
Trained an RL agent to optimally pack incoming boxes on a pallet from a conveyor belt, maximizing capacity using Packing Configuration Trees methodology.
Futbala
Physics-Based Humanoid Football
Trained fully articulated humanoid characters to learn football in a physics-based simulation, recreating DeepMind's motor control to team play research.
AMS Inform
LLM-Powered Document Automation
Built a full-stack web application for automated document screening and reference checks, featuring email parsing, NER, document classification, and automated outreach.
Academic Research
Research work spanning robotics, reinforcement learning, and character control
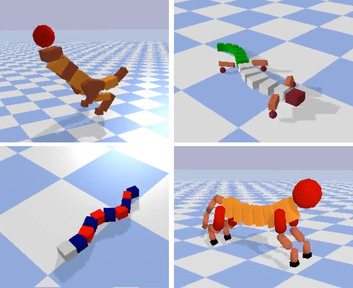
Motor Babble: Morphology Driven Coordinated Control of Articulated Characters
A morphology-driven framework that learns coordinated locomotion without any reference motion data by first generating a 'motor babble' motion corpus, extracting a low-dimensional synergy (coactivation) space, and then training an RL policy to locomote by exciting a small set of these synergies.
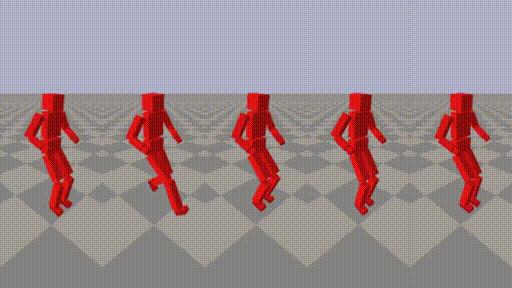
Low Dimensional Motor Skill Learning Using Coactivation
A deep RL framework that learns high-fidelity motor skills by controlling a humanoid through a low-dimensional joint “coactivation” (synergy) space extracted from reference motion — reducing action dimensionality while remaining robust even under sparse rewards.
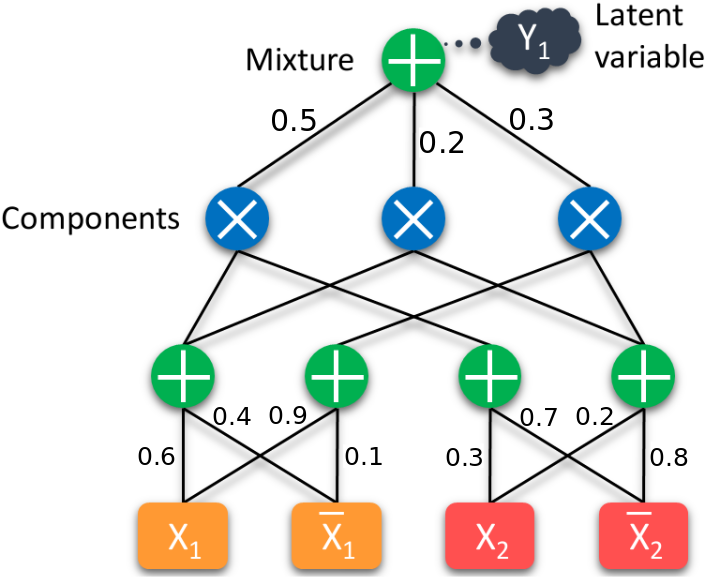
LibSPN: Sum-Product Networks Library
A general-purpose Python library for building, learning, and performing exact inference in Sum-Product Networks (SPNs) at scale, tightly integrated with TensorFlow (plus custom C++/CUDA ops) to enable efficient CPU/GPU execution, structure manipulation, and practical end-to-end workflows.
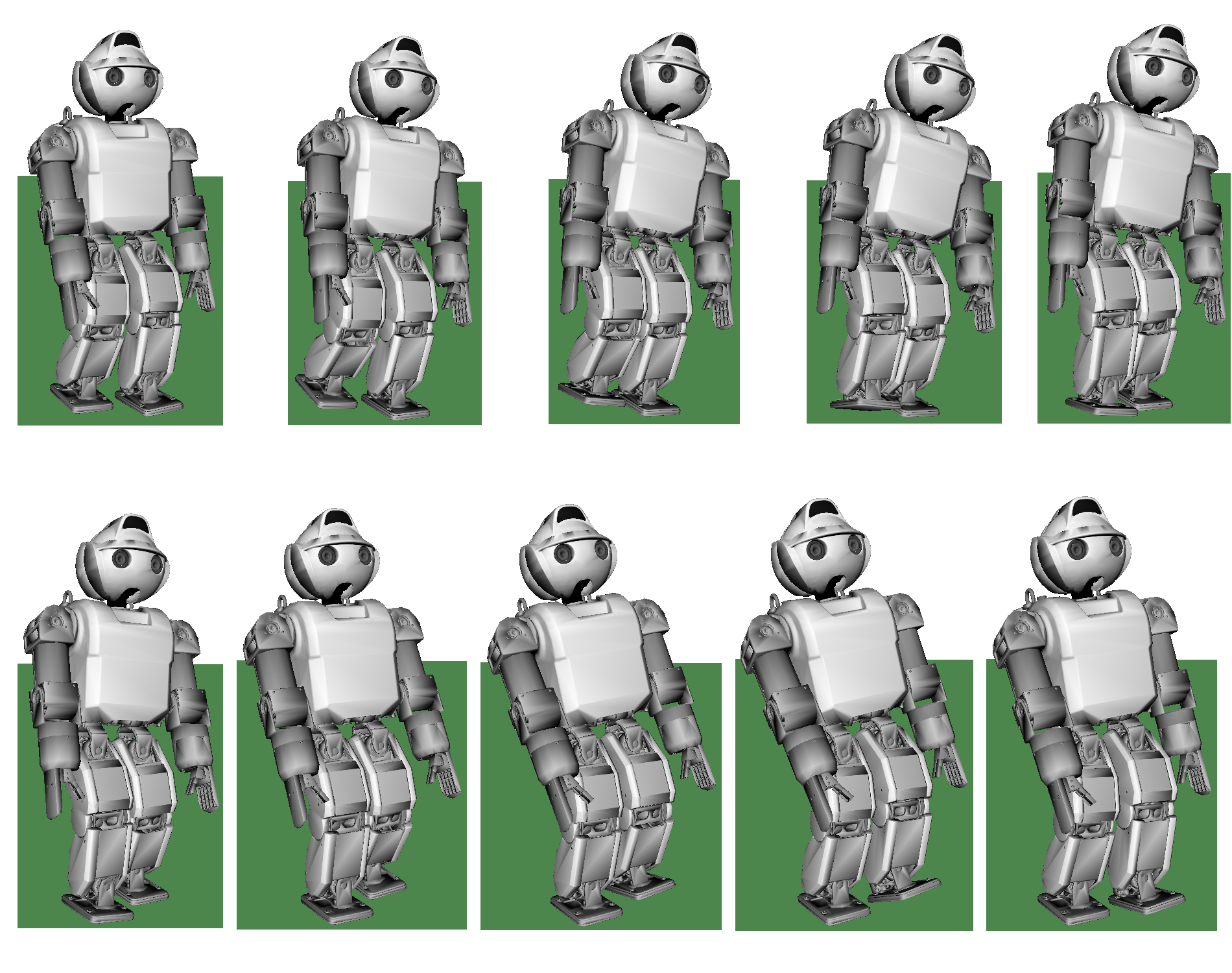
Evolving Bipedal Gait
A feature-driven linear periodic gait generator that can model a wide range of joint trajectories via interpretable shape features—and can be hand-fit to stable reference gaits or optimized end-to-end with a Genetic Algorithm to learn stable, faster bipedal walking.
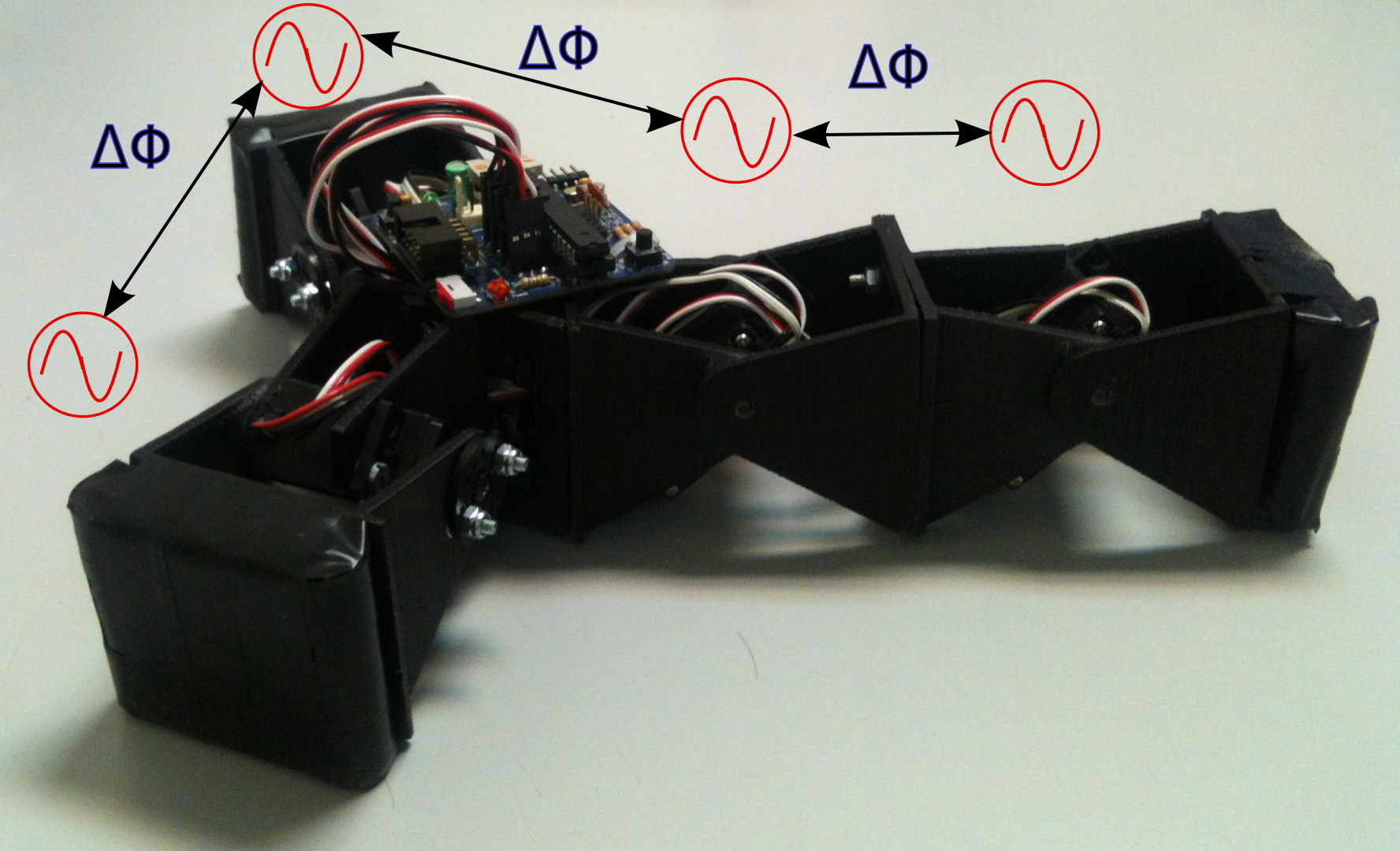
Embodied Evolution of Modular Robot Locomotion
Evaluating candidate controllers directly on physical robots using embodied evolution to address the reality gap between simulation and real-world performance.
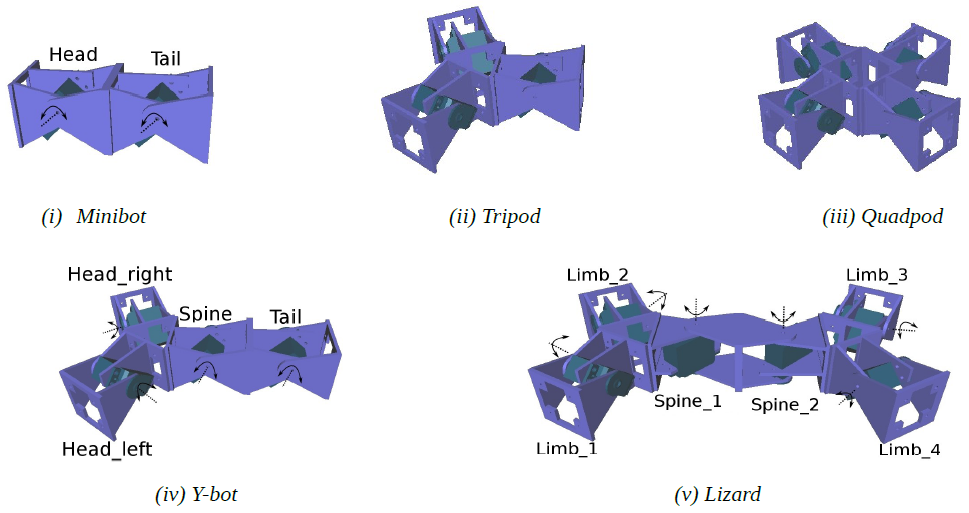
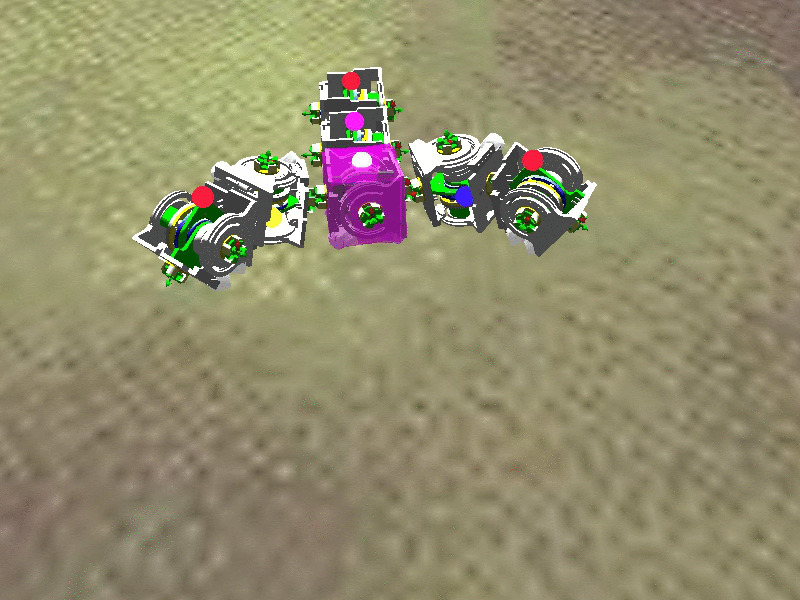
Morphology based Modular Robot Locomotion
Investigating emergent coordinated locomotion in modular robots through indirect communication (stigmergy), demonstrating strong interdependence between morphology and behavior.
Digital Hormones for Modular Robots
Distributed controller using local communication between connected modules in modular robots, inspired by biological hormones for emergent global behavior.
Visual Motion Detection and Tracking
Computer vision system for detecting motion in indoor environments and tracking objects based on color distribution using Bhattacharyya distance.
Publications
Peer-reviewed research papers and conference proceedings
Motor Babble: Morphology Driven Coordinated Control of Articulated Characters
A. Ranganath, A. Biswas, I. Karamouzas, and V. Zordan
Motion, Interaction and Games (MIG), 2021, Lausanne, Switzerland
View PDFLow Dimensional Motor Skill Learning Using Coactivation
A. Ranganath, P. Xu, I. Karamouzas, and V. Zordan
Motion, Interaction and Games (MIG), 2019, Newcastle, UK
View PDFLibSPN: A Library for Learning and Inference with Sum-Product Networks and TensorFlow
A. Pronobis, A. Ranganath, and R.P. Rao
Workshop on Principled Approaches to Deep Learning, ICML 2017, Sydney, Australia
View PDFCurrent trends in reconfigurable modular robots design
A. Brunete, A. Ranganath, S. Segovia, J. Perez de Frutos, M. Hernando, and E. Gambao
International Journal of Advanced Robotic Systems, 14(3), DOI: 10.1177/1729881417710457
View PDFGait generation through a feature based linear periodic function
A. Ranganath and L. Moren
Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain
View PDFMorphology Dependent Distributed Controller for Locomotion in Modular Robots
A. Ranganath, J. Gonzalez-Gomez, and L. Moren
Post-Graduate Conference on Robotics and Development of Cognition, Lausanne, Switzerland
View PDFA distributed neural controller for locomotion in linear modular robotic configurations
A. Ranganath, J. Gonzalez-Gomez, and L. Moren
Proceedings of the 8th Workshop of RoboCity2030, Madrid, Spain
View PDFAbout Me
Background and experience
I am a freelance RL/ML Engineer working with early-stage startups. Currently, I lead the RL/ML efforts at Brick, focusing on automating HVAC control systems. I'm also building InvoiceQA, an AI-powered invoice verification platform to prevent payment errors and fraud.
Previously, I worked as a postdoctoral researcher at the School of Computing, Clemson University, where I conducted research on physics-based character animation using deep reinforcement learning.
Before joining Clemson, I worked as a research engineer at the Robotics, Perception and Learning lab, KTH Royal Institute of Technology, contributing to probabilistic deep learning research.
Education
Ph.D. in Intelligent Robotics
University Carlos III of Madrid
Robotics Lab
M.Sc. in Artificial Intelligence
University of Edinburgh
School of Informatics
Core Skills
Get in Touch
Let's discuss how I can help with your project
Ready to collaborate?
I'm always interested in hearing about new projects and opportunities. Whether you need help with reinforcement learning, machine learning, or LLM-based solutions, feel free to reach out.